Con la prevalencia de la robótica creciendo en todas las facetas de la vida cotidiana, los robots se están convirtiendo en una parte más crucial de nuestro ecosistema. Contamos con ellos para fines militares en el frente de guerra, dependemos de ellos para ayudar a los médicos en la industria de la salud, e incluso son los primeros en responder y la policía los utilizan. Esta no es una lista exhaustiva y si no tomamos medidas para protegerlos, se convertirán en serias amenazas de seguridad. En ciberseguridad, el primer paso para asegurar un recurso es tradicionalmente el desarrollo de un modelo de amenaza. Un modelo de amenaza puede ayudar a evaluar la probabilidad y el daño potencial, lo que puede ser útil para minimizar o erradicar la amenaza. Históricamente, la ciberseguridad en robótica no ha sido una preocupación eminente, por lo que para determinar un modelo de amenaza válido, estos sistemas deben ser estudiados y monitorizados para conocer el alcance de los ataques que podrían afectarles. Esto podría lograrse con un honeypot especialmente diseñado para sistemas robóticos.
Desde su inicio, los honeypots se han enfocado principalmente
en el dominio de informática tradicional, que busca monitorizar a los atacantes que pretenden comprometer las estaciones de trabajo y servidores de la empresa. La primera honeynet (una red de honeypots) para CPS (Cyber Physical Systems) / SCADA (Control de supervisión y adquisición de datos) fue creada por Venkat Pothamsetty y Matthew Franz del Grupo de garantía de infraestructura de Cisco (CIAG) en 2004. El objetivo era simular unos pocos servicios populares de PLC (Controlador Lógico Programable) para ayudar a los investigadores a comprender mejor los riesgos de los dispositivos del sistema de control expuesto. Este trabajo ha sentado las bases para muchos otros honeypots de CPS, ninguno de los cuales es directamente aplicable al dominio de la robótica. Con la prevalencia de los sistemas robóticos en aumento, es fundamental que las técnicas avanzadas de monitorización, como los honeypots, se amplíen para defenderlos.
La evasión de Honeypot es, como en la mayoría de la ciberseguridad, el juego del gato y el ratón. Casi siempre existen huellas de configuración para cualquier honeypot, y se corrigen cuando los atacantes las descubren y los defensores mejoran. Una forma de detectar honeypots arbitrarios es observar el rol de una máquina en una red. Los Honeypots son, por definición, solo interactuados por los atacantes. Si las máquinas en una red no intercambian tráfico con los hosts que las rodean, y parece que los usuarios normales no las utilizan, es obvio que la máquina es un honeypot. El HoneyBot intenta abordar estas preocupaciones para los sistemas robóticos. En primer lugar, el sistema robótico existe y está en uso, lo que remedia la tradicional falta de contexto. En segundo lugar, no está virtualizado, sino implementado en hardware real. Finalmente, el sistema robótico implementa por completo los servicios presentados, por lo que todas las respuestas del sistema están en línea con los dispositivos HoneyBot. El HoneyBot es el primer honeypot de interacción híbrida de software específicamente diseñado para sistemas robóticos en red. Al simular acciones inseguras y realizar acciones seguras físicamente en el HoneyBot, tratamos de engañar a los atacantes para que crean que sus hazañas son exitosas, al mismo tiempo que registramos todas las comunicaciones para usarlas en la atribución y la creación del modelo de amenaza.
Ciberseguridad en robótica
El campo de la robótica siempre está cambiando, pero los componentes que unen a casi todas las clases de robots son sensores, actuadores y controladores.
Los sensores son los ojos y oídos del robot. Permiten que el robot comprenda el mundo que lo rodea y juzgue las características del entorno. El HoneyBot debe ser capaz de "simular", a través de la simulación, cualquier valor de sensor que el robot produzca, de forma que un atacante no sepa que los comandos no se ejecutan en realidad. Para hacer esto, se han desarrollado modelos de dispositivos que proporcionan respuestas de sistema realistas con una entrada "insegura / indeterminada" por parte de un atacante.
El siguiente componente común a cada clase de robots son los actuadores. Los actuadores permiten que el robot modifique el entorno y se mueva o actúe. La implementación de HoneyBot vive en un robot que opera en entornos de red y los usuarios / atacantes no tienen acceso físico o visual. En su lugar, enfatiza la simulación precisa del momento de las respuestas del sistema y cómo los comandos del usuario cambiarán el estado del sistema global.
El tercer componente de un robot, y posiblemente el más importante, es el sistema de control o controlador. El controlador, también conocido como el cerebro del robot, permite al robot analizar comandos, enviar señales a diferentes dispositivos y comunicarse con otros robots además del usuario.
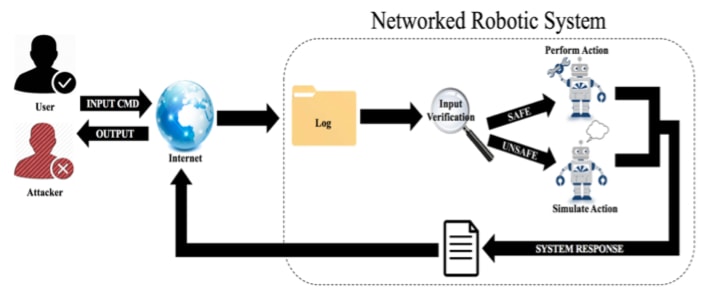
El HoneyBot es un software que vivirá en el controlador del robot para que pueda acceder fácilmente a todos los comandos de datos y señales hacia y desde el cerebro del robot, lo que le permite tomar decisiones de forma consecuente. Un usuario / atacante se conecta de forma remota al sistema robótico en red a través de Internet y puede enviar comandos. Todos los comandos recibidos por el robot se registrarán y pasarán al módulo de verificación de entrada, que, como se indicó anteriormente, es flexible en su estructura y puede ser muy completo en la evaluación de comandos o relajar según las necesidades de la aplicación. Si el módulo de verificación de entrada considera que un comando es seguro, la acción se realizará de la forma habitual y la respuesta del sistema se devolverá al usuario / atacante. Si, por otro lado, el módulo de verificación de entrada considera que un comando no es seguro, el comando se simulará en tiempo real y se generará y se devolverá la respuesta del sistema "fake".
Honeypot para sistemas robóticos
Dada la creciente cantidad de programas maliciosos dirigidos a CPS que se encuentran, algunos comienzan a señalar que los sistemas de control industrial son la nueva frontera para los ciberataques. En el pasado, los honeypots de CPS se diseñaron para imitar componentes de CPS específicos en una red para proteger los recursos. Sin embargo, la mayoría de los honeypots existentes de CPS descuidan ciertos aspectos de estos sistemas que pueden alertar a un atacante sobre la naturaleza del honeypot, es decir, la física de los dispositivos que interactúan con el proceso. Es por eso que HoneyBot se basa en trabajos anteriores, como HoneyPhy. HoneyPhy es un marco de honeypot sensible a la física que modela con precisión las huellas dactilares de software y los protocolos que luego se utilizan para simular el CPS y engañar a los atacantes que acceden al honeypot. El framework HoneyPhy se compone de tres módulos principales:
- la interfaz de Internet
- Modelo de proceso
- módulos del modelo de dispositivo.
Tal como se aplica al HoneyBot, el Módulo de Interfaz de Internet se utiliza para abrir puertos o interfaces en el sistema robótico de modo que se pueda conectar a una red. En otras palabras, la interfaz de Internet es la interfaz del usuario, la interfaz que el atacante puede ver. El Modelo de proceso se activa con un comando "inseguro" o "indeterminado", y la acción se simulará en tiempo real al consultar el modelo de dispositivo apropiado en lugar de enviarse para que se realice determinísticamente en el robot. El Modelo de Dispositivo es diferente de los otros módulos ya que contiene un modelo representativo de cada dispositivo que se encuentra dentro de un robot. Estos modelos están construidos a partir de datos reales recopilados de un dispositivo determinado.
Experimentación de los modelos
Para el desarrollo del modelo, se debe utilizar una combinación de técnicas que incluyen experimentación y modelado de procesos físicos para simular el comportamiento del dispositivo. Los modelos creados se consultan en tiempo de ejecución para generar respuestas "falsas" que se envían a los atacantes cuando realizan acciones maliciosas o inseguras. Supongamos que el HoneyBot se implementó en un dron militar utilizado para encontrar IED (dispositivos explosivos improvisados) y recibió un comando que lo ordena pasar por una zona de exclusión aérea. Claramente, hay algo sospechoso, por lo que el módulo de verificación de entrada marca la acción como insegura. Luego, el dron consulta su modelo de dispositivo GPS y devuelve las coordenadas falsas, manteniendo su posición en un área no restringida, pero haciendo que el usuario crea que está en otra parte. Los modelos de dispositivo no solo deben proporcionar datos realistas con conciencia del estado, sino que también deben reflejar la correlación entre los sensores. Por ejemplo, un sensor de distancia debe corroborar los datos de velocidad informados, y los datos de velocidad deben estar en línea con las lecturas del codificador.
Conclusiones
HoneyBot es el primer honeypot para sistemas robóticos. Los honeypots existentes no pueden engañar a los atacantes inteligentes porque no modelan con precisión la física de los dispositivos. HoneyBot soluciona esto aprovechando HoneyPhy y las técnicas de los honeypots tradicionales. Los modelos de dispositivos se construyeron para sensores robóticos comunes y se les solicitó que proporcionen actualizaciones y respuestas convincentes del estado del sistema. Al simular acciones inseguras y realizar físicamente acciones seguras en HonbeyBot, podemos engañar a los atacantes para que crean que sus ataques son exitosos, al mismo tiempo que registramos todas las comunicaciones que se utilizarán para la atribución y la creación del modelo de amenaza. El HoneyBot es un honeypot de interacción híbrido específicamente diseñado para sistemas de robots y debería ser el estándar de facto para la seguridad de los robots a medida que la prevalencia de robots crezca en la sociedad.